P
L
E
N
Obszar roboczy 3 kopia 7
180 słów
Google Asystent zyskał polski głos. Możesz go poznać, dzięki nowemu wydaniu gry w słowa. Potrenuj szare komórki i poznaj charakter polskiego Google Asystenta.
MiniSnower180
Co to za święta bez śniegu? Wesołe święta, to białe święta. Postanowiliśmy podarować odrobinę białego szaleństwa naszym klientom i kontrahentom. Tak powstał pomysł na armatkę śnieżną. Najlepiej, by każdy mógł ją uruchomić na biurku – na przykład poprzez złącze USB. Potem już tylko wystarczyłoby załadować zbiornik, włączyć, czary mary i śnieg sypie jak w najpiękniejszych filmach Disney’a.
Budino - czyli prowadź mnie krok po kroku po wnętrzu
Nie korzystać z GPS w smartfonie? Dziś sobie tego po prostu nie wyobrażamy. Nawet będąc pierwszy raz w obcym mieście, na drugim krańcu Europy, możemy jeździć swobodnie czy znaleźć restaurację. To niezmiernie ułatwia codzienne życie. A co by było, gdybyśmy krok po kroku mogli być prowadzeni wewnątrz budynków? Na przykład w muzeum lub markecie? Postawiliśmy sobie za cel stworzenie prototypu nawigacji, dzięki której będziemy prowadzeni od drzwi do drzwi. Przede wszystkim jako narzędzia do działań typu remarketing.
Cruxbox
Cruxbox - czyli co by się stało gdybyśmy mogli podsumować każde służbowe spotkanie.
Prezentacja check-In
Prezentacja Check-In zrealizowana na potrzeby Warsztatów Innowacji Lab^180. Checkin’owanie przy pomocy NFC (Near Field Communication), czyli szybkie meldowanie się w Internecie z każdego miejsca.
Reportaż z warsztatów
Jedną z najprostszych a jednocześnie najdokładniejszych metod służących do śledzenia ruchu ciała, jest użycie sensora Kinect.
Śledzenie ruchu ciała
Jedną z najprostszych a jednocześnie najdokładniejszych metod służących do śledzenia ruchu ciała, jest użycie sensora Kinect.
Kreujemy jutro
I stało się. Warsztat innowacji Lab^180 edycja druga jest już historią. Osobom, które mogły wziąć udział w tym wydarzeniu – dziękujemy. Pozostałych zapewniamy, że w kolejnej edycji zrobimy tyle, ile się da, aby wszyscy chętni mogli w organizowanych przez nas warsztatach uczestniczyć. Dla jednych i drugich przygotowaliśmy fotoreportaż.
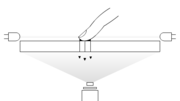
Lab Surface – laser light plane
Tydzień temu testowaliśmy działanie rozwiązania, które nosi nazwę LED Light Plane. Tym razem, zamiast nadajników podczerwieni LED, użyliśmy modułów laserowych podczerwonych z generatorami linii.
Prototyp ekranu dotykowego (LED-LP)
Testowaliśmy wczoraj z Robertem rozwiązanie, które nosi nazwę LED Light Plane (LED-LP). Podstawowym elementem były nadajniki podczerwieni LED (użyliśmy 950nm 34º) oraz zwykła kamera USB (w naszym przypadku Logitech QuickCam Pro 4000).
Nasza strona używa cookies. Dzięki nim możemy dostosowywać stronę do potrzeb użytkowników. Pliki są zapisywane w przeglądarce.
Polityka prywatności
Nie akceptuje
Akceptuje